Research Areas
Stretchable Soft Sensors and Electronics
Soft sensors mimicking the somatosensory capabilities of human skin could be significant towards realization of autonomous operations of soft robots. To pursue this, we have been involved in developing soft sensors for tactile sensing and proprioception. In some of the previous works, we have developed printed soft metamaterial arrays for pressure sensing on curved surfaces, and highly stretchable knitted circuits for sensing of human joint movements complemented with machine learning models for classification of Activities of Daily Living (ADLs). Ongoing work includes development of stretchable sensing circuits to capture multi-DOF motion of human joints.


Selected Publications:
- Leon Yeong Wei Loh*, Ujjaval Gupta*, Yingxi Wang, Choon Chiang Foo, Jian Zhu, and Wen Feng Lu. “3D printed metamaterial capacitive sensing array for universal jamming gripper and human joint wearables.” Advanced Engineering Materials 23, no. 5 (2021): 2001082.
- Ujjaval Gupta, Jun Liang Lau, Alvee Ahmed, Pei Zhi Chia, Gim Song Soh, and Hong Yee Low. “Soft Wearable Knee Brace with Embedded Sensors for Knee Motion Monitoring.” In 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), pp. 7348-7351. IEEE, 2021.
- Pei Zhi Chia, Ujjaval Gupta, Ying Yi Tan, Jun Liang Lau, Alvee Ahmed, Gim Song Soh, and Hong Yee Low. “Effect of Stitch Pattern on the Electrical Properties of Wale-wise Knitted Strain Sensors and Interconnects.” In 2021 IEEE Sensors, pp. 1-4. IEEE.
Bio-inspired Soft Robots
Soft robots comprised of soft actuators offer high compliance and strong adaptability much similar to natural creatures. Soft actuators driven by soft active materials are advantageous because of their simple actuation mechanism, lightweight and compliant structure. In many of our previous works, we have been involved in developing bio-inspired soft robots that mimic the form or function of their natural counterparts. We have utilized dielectric elastomer based artificial muscles to drive a highly transparent soft robot with camouflaging capabilities inspired from leptocephalus, a robotic jaw inspired by the masseter muscles in human jaw, and a fast response and low power soft robotic gripper inspired from the Venus flytrap. Building on our previous works on soft robots, one of the interest areas is to develop robots with integrated sensing for healthcare applications.



Selected Publications:
- Ujjaval Gupta*, Yuzhe Wang*, Hongliang Ren, and Jian Zhu. (2018). “Dynamic Modelling and Feedforward Control of Jaw Movements Driven by Viscoelastic Artificial Muscles.”, IEEE Transactions on Mechatronics, 24(1), 25-35.
- Pengcheng Li*, Yuzhe Wang*, Ujjaval Gupta*, Liu Jun, Zhang Lei, Du Donghe, Choon Chiang Foo, Jianyong Ouyang, and Jian Zhu. (2019). “Transparent Soft Robots for Effective Camouflage.”, Advanced Functional Materials, 1901908.
- Yuzhe Wang, Ujjaval Gupta, Nachiket Parulekar, and Jian Zhu. (2018). “A soft gripper of fast speed and low energy consumption.”, Science China Technological Sciences, 62 (1), 31-38.
Modelling and Control of Soft Robots
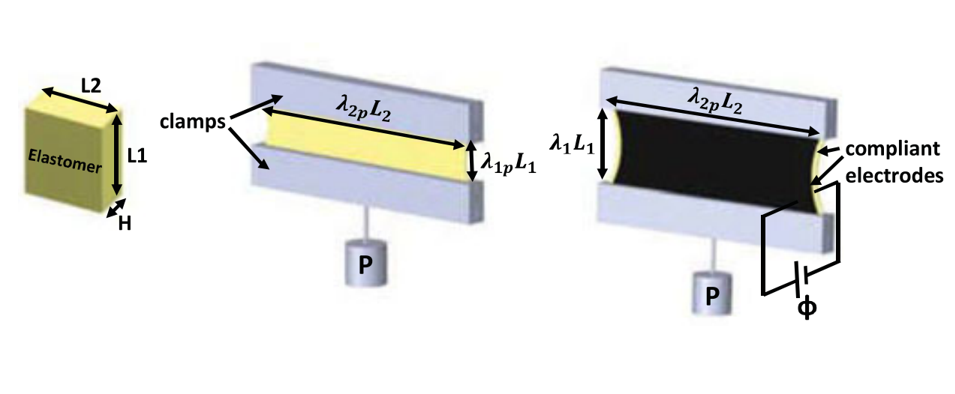
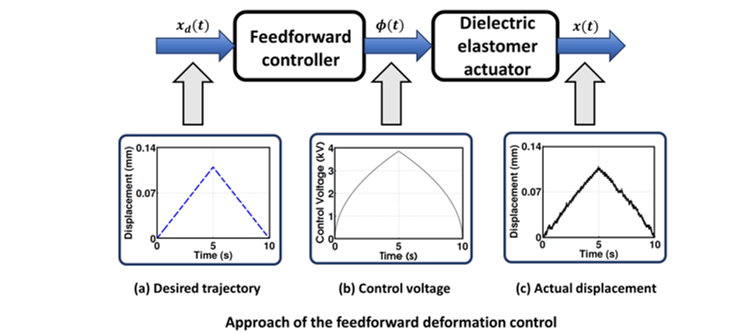
Effective control strategies are key to realize practical applications of soft robots. However, soft actuators are challenging to control due to their nonlinear dynamic response and time dependent viscoelastic effects. In this regard, in some of our previous works we investigated the dynamics of dielectric elastomer driven soft actuators, and developed physics-based models that can accurately capture their underlying behavior. These models were used to develop feedforward controllers and also deployed in a combination of feedforward and feedback controllers to achieve precise deformation control.
Selected Publications:
- Guo-Ying Gu *, Ujjaval Gupta*, Jian Zhu, Li-Min Zhu, and Xiangyang Zhu. (2017). “Modeling of Viscoelastic Electromechanical Behavior in a Soft Dielectric Elastomer Actuator.”, IEEE Transactions on Robotics 33(5), 1263-1271.
- Guo-Ying Gu, Ujjaval Gupta, Jian Zhu, Li-Min Zhu, and Xiangyang Zhu. (2015). “Feedforward deformation control of a dielectric elastomer actuator based on a nonlinear dynamic model.”, Applied Physics Letters, 107(4), 042907.
- Zezhou Li, Lei Qin, Dongsheng Zhang, Aifen Tian, Henry YK Lau^, and Ujjaval Gupta^. (2020). “Modeling and feedforward control of a soft viscoelastic actuator with inhomogeneous deformation.” Extreme Mechanics Letters, 40, 100881.
- Jiawei Cao, Wenyu Liang, Qingyuan Ren, Ujjaval Gupta, Feifei Chen, and Jian Zhu. (2018). “Modelling and Control of a Novel Soft Crawling Robot based on a Dielectric Elastomer Actuator.” In 2018 Proc. of the International Conference on Robotics and Automation (ICRA), Brisbane, Australia, May 21-May 25, 2018.
^– co-corresponding author
Dynamics of Soft Active Materials
Soft active materials that deform in response to external stimulus are promising candidates for developing soft actuators. In practical applications, dynamics of soft actuators is significant to understand their resonant behavior which may exhibit different vibration modes or harmonic responses (superharmonic, harmonic and subharmonic) due to nonlinear oscillations. In some of the previous works, we have utilized dynamics of dielectric elastomer actuators to provide kinesthetic sense of touch at the fingers and harnessed vibrations to achieve 2 DOF locomotion in a soft robot. Investigating the dynamics of soft active materials and exploiting it to enhance performance of soft robots is one of the areas of interest.


Selected Publications:
- Ujjaval Gupta, Hareesh Godaba, Zijie Zhao, Chee Kong Chui, and Jian (2015). “Tunable force/displacement of a vibration shaker driven by a dielectric elastomer actuator.”, Extreme Mechanics Letters 2, 72-77.
- Ujjaval Gupta, Hareesh Godaba, and Jian Zhu. (2014). “Dynamic Analysis of a Vibration Shaker Based on a Dielectric Elastomer Actuator.” In 2014 Proceedings of the 25th CANCAM, London, Ontario, Canada, May 31-June 4, 2014.
- Pengcheng Li*, Yuzhe Wang*, Ujjaval Gupta*, Liu Jun, Zhang Lei, Du Donghe, Choon Chiang Foo, Jianyong Ouyang, and Jian Zhu. (2019). “Transparent Soft Robots for Effective Camouflage.”, Advanced Functional Materials, 1901908.